| Felix Gantner [*] | |
| Rechtsdurchsetzung und autonome Systeme | |
| JurPC Web-Dok. 121/2019, Abs. 1 - 96 | |
|
| |
| 1. Wirksamkeit und Geltung von Rechtsnormen | Abs. 1 |
| Kelsen sieht in der Wirksamkeit einer Norm auch eine Voraussetzung für die Geltung dieser Norm. „Eine Norm, die nirgends und niemals angewendet und befolgt wird, das heißt eine Norm, die – wie man zu sagen pflegt - nicht bis zu einem gewissen Grade wirksam ist, wird nicht als gültige Rechtsnorm angesehen. Ein Minimum an sogenannter Wirksamkeit ist eine Bedingung ihrer Geltung.“[1] | Abs. 2 |
| Eine Rechtsnorm ist also nur dann wirksam, wenn sie tatsächlich befolgt wird. | Abs. 3 |
| Wird ein Übermaß an Rechtsnormen einer Rechtsordnung nicht befolgt, ist also ein großer Teil der Rechtsnormen nicht wirksam, so kann das dazu führen, dass die gesamte Rechtsordnung unwirksam wird und zusammenbricht.[2] | Abs. 4 |
| Die Entwicklung autonomer Systeme stellt mit zunehmendem Einsatz dieser Maschinen die Wirksamkeit von Rechtsordnungen oder zumindest von einzelnen Rechtsnormen in Frage. Dies hängt mit der charakterisierenden Eigenschaft autonomer Systeme zusammen: der Autonomie. | Abs. 5 |
| 2. Autonome Systeme und Recht | |
| Die Autonomie dieser Systeme bedeutet, dass sie im Rahmen eines Entscheidungs- und Handlungsraums eigenständig, also autonom auf die Umwelt reagieren. Dies ist eine neue Qualität dieser Systeme, die natürlich auch rechtlich relevant ist. | Abs. 6 |
| Der Entscheidungs- und Handlungsraum, also die Regeln, die das System bei der Reaktion auf seine Umwelt befolgt, kann bei der Systementwicklung abschließend definiert werden, oder aber bei lernenden Systemen im Rahmen des Betriebs verändert werden. | Abs. 7 |
| Entscheidend für die Autonomie ist, dass nicht mehr sämtliche Verhaltensweisen und Reaktionen auf die Umwelt durch das System unmittelbar oder mittelbar vom Betreiber der Maschine vorhergesehen und vor allem direkt beeinflusst werden können. Je autonomer es gestaltet ist, desto geringer ist die Möglichkeit der Einflussnahme. | Abs. 8 |
| Die Beziehungen zwischen den Produzenten, dem Nutzer bzw. Betreiber und der Maschine verändern sich beim Übergang von nicht autonomen zu autonomen Systemen wesentlich. Bei nicht autonomen Systemen ist eine klare hierarchische Struktur vorhanden, die zumindest auch theoretisch die Verantwortungen für den Betrieb und die damit einhergehenden Gefahren eindeutig verteilt. Diese Strukturen lösen sich bei autonomen Systemen auf, insbesondere bei lernenden Systemen. | Abs. 9 |
| Bis jetzt konnte man bei nicht-autonomen Systemen von der Hierarchie | Abs. 10 |
| – Produzent/Entwickler | Abs. 11 |
| – Betreiber | Abs. 12 |
| – Maschine | Abs. 13 |
| ausgehen. | Abs. 14 |
| 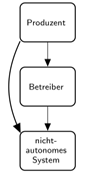
Abbildung 1: Kontrollmöglichkeiten nicht-autonome Systeme | Abs. 15 |
| Durch den Produzenten bzw. Entwickler des Systems werden dessen Funktionen und Verhalten definiert. Der Betreiber setzt es dann ein und hat während der Verwendung des nicht-autonomen Systems die Kontrolle über dieses. | Abs. 16 |
| Dieses stark vereinfachte Modell bleibt in der Grundstruktur erhalten, auch wenn es z.B. um Vertriebs- oder Service-Einheiten erweitert wird oder Adaptierungen bzw. Erweiterungen des Systems berücksichtigt werden. | Abs. 17 |
| Entscheidend ist, dass der Betrieb und das Verhalten des nicht-autonomen Systems (zumindest theoretisch) zu jedem Zeitpunkt der Verwendung der Aufsicht und Kontrolle des Betreibers unterliegt. | Abs. 18 |
| Für Autonomie ist hingegen grundlegend, dass genau diese Kontrolle nicht mehr oder nur mehr eingeschränkt vorhanden ist. Die Kontrollstrukturen verändern sich so, dass mit steigender Autonomie die Kontroll- und Eingriffsmöglichkeiten des Betreibers reduziert werden. | Abs. 19 |
| Die Autonomie verändert die Beziehung und macht aus der Maschine einen eigenständigen, mit variierender Unabhängigkeit ausgestatteten Mitbeteiligten. | Abs. 20 |
| Teilweise wird auf diese neue Rolle der Maschine mit der Forderung nach einer Rechtspersönlichkeit[3] – wie auch immer diese gestaltet werden soll – für autonome Systeme reagiert (oder diese abgelehnt[4]). Diese Konstruktion einer künstlichen Person soll jedenfalls die rechtliche Fähigkeit zur eigenständigen Verantwortlichkeit und damit auch einer Haftung zur Folge haben. | Abs. 21 |
| 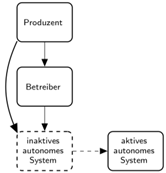
Abbildung 2: Einschränkung der Kontrolle über aktive autonome Systeme | Abs. 22 |
| Auf Details zum Konstrukt einer künstlichen Person soll an dieser Stelle nicht weiter eingegangen werden. Vielmehr soll im Folgenden dargestellt werden, wie durch technische Lösungen unabhängig vom Konzept einer künstlichen Person eine Einbindung der autonomen Systeme in die Rechtsordnung realisiert werden kann. | Abs. 23 |
| Es geht um die Frage, wie aus einem autonomen System ein autonomes „rechtsunterworfenes“ System wird. Oder aus Sicht des Gesetzgebers, wie Rechtsnormen auch für autonome Systeme unmittelbar wirksam werden können und damit die Wirksamkeit der Rechtsordnung gewahrt bleibt. | Abs. 24 |
| 3. Rechtsnormen als Teil des Entscheidungs- und Handlungsraums | |
| Soll ein autonomes System Rechtsnormen beachten, dann sind die Rechtsnormen bzw. ein diesen entsprechendes Systemverhalten zu implementieren. Dies kann am einfachsten bei der Entwicklung der Maschine geschehen. | Abs. 25 |
| Ist das Gerät jedoch bereits ausgeliefert und in Betrieb, so sind rechtliche Änderungen nicht mehr so einfach z.B. durch Updates umzusetzen. Vor allem aber kann man während des Betriebs des Systems wegen der Autonomie nur mehr beschränkt eingreifen und die Rechtskonformität sicherstellen. | Abs. 26 |
| 1.1. Rechtsnormen | Abs. 27 |
| Doch welche Rechtsnormen sind aus Sicht der Entwickler bzw. des autonomen Systems überhaupt relevant und welche Eigenschaften haben diese? | Abs. 28 |
| Das Beispiel des „typischen“ autonomen Systems, die autonom fliegende Drohne, zeigt, dass im Bereich der Rechtsvorschriften, deren Beachtung eingefordert wird, differenziert werden muss. | Abs. 29 |
| In einem ersten Schritt kann unterschieden werden zwischen: | Abs. 30 |
| – Rechtsnormen als Betriebsvoraussetzung und | Abs. 31 |
| – verhaltenssteuernden Normen | Abs. 32 |
| 1.1.1. Rechtsnormen als Betriebsvoraussetzung | Abs. 33 |
| Diese Rechtsnormen geben den Rahmen für die Entwicklung, die Erzeugung und den Betrieb vor. Solche Vorschriften unterscheiden sich meist für autonome nicht von denen für nicht-autonome Systeme. Technische Normen sind für diesen Bereich des Rechts typisch. | Abs. 34 |
| Für Produzent und Betreiber stellen diese Normen in Bezug auf autonome Systeme keine Änderung gegenüber der Situation bei der Produktion nicht-autonomer Systeme dar. | Abs. 35 |
| 1.1.2. Verhaltenssteuernde Normen und die Unmöglichkeit der vollständigen Implementierung | Abs. 36 |
| Anders stellt sich die Situation dar bei Normen, die das Verhalten des Systems während des Betriebs beeinflussen. Während bei nicht-autonomen Systemen der Betreiber flexibel auf rechtliche Änderungen reagieren kann, ist dies mit steigender Autonomie der Systeme in immer geringerem Ausmaß möglich. | Abs. 37 |
| Betreffen die Regelungen nämlich den autonomen Verhaltensbereich eines solchen Systems, dann verhindert ja gerade das Konzept der Autonomie und dessen Umsetzung, dass der Betreiber ohne Unterbrechung steuert und permanent die vollständige Kontrolle über alle Funktionen und das gesamte Verhalten der Maschine hat. | Abs. 38 |
| Das autonome System muss daher die im Rahmen der Autonomie zu beachtenden Rechtsnormen kennen und interpretieren oder zumindest implementiert haben und dadurch fähig sein, sie zu beachten. | Abs. 39 |
| Doch was bedeutet das konkret? | Abs. 40 |
| Dies lässt sich am Beispiel der Drohne darstellen, die autonom auf Grund vorhandener geografischer Daten autonom eine Flugroute berechnet und sich entlang dieser auch autonom fortbewegt. Der Entscheidungs- und Handlungsraum dieses autonomen Systems kann, unter Vernachlässigung von Geschwindigkeit, ..., für das Beispiel sehr stark reduziert werden auf eine Folge von geografischen Koordinaten (x,y und z [= Flughöhe]), entlang derer sich die Drohne bewegt. | Abs. 41 |
| Zusätzlich ist für die rechtliche Einordnung der Flugroute noch der Zeitpunkt t oder der Zeitraum, in dem bestimmte geografische Koordinaten überflogen werden, von Bedeutung. | Abs. 42 |
| Diese Parameter x, y, z und t können mit Rechtsvorschriften in Beziehung gesetzt werden. Dabei ist zu beachten, dass für Rechtsordnungen selbst und einzelne Rechtsnormen auch geografische Beschränkungen gelten, nämlich ihr örtlicher Geltungsbereich. Zusätzlich sind auch der zeitliche Geltungsbereich und die zeitliche Variabilität zu beachten. | Abs. 43 |
| Dabei kann unterschieden werden zwischen: | Abs. 44 |
| – zeitlich statisch im Gegensatz zu Rechtsnormen, die eine große zeitliche Variabilität aufweisen. Eine Norm weist eine große zeitliche Variabilität auf, wenn ihr Inhalt sich stark mit der Zeit ändert oder von ihr abhängt, wie z.B. ein Nachtflugverbot. Sie ist von der zeitlichen Geltungsdauer der Rechtsnorm zu unterscheiden, die ebenfalls für autonome Systeme ein Problem darstellt. Die Kombination von zeitlicher Variabilität und Geltungsdauer ist der zeitliche Anwendungsbereich einer konkreten Regelung, also jene Zeitpunkte, in denen das autonome System eine Regel beachten muss. | Abs. 45 |
| – geografisch global[5] oder zumindest für große Gebiete geltende im Gegensatz zu Rechtsnormen mit eingeschränktem örtlichen Geltungsbereich. | Abs. 46 |
| Beispiele der unterschiedlichen Kombinationen von Geltungsbereichen für Rechtsnormen, die den Handlungsraum der Beispiel-Drohne beschränken, enthält Tabelle 1. | Abs. 47 |
| Eine Drohne müsste bei Berechnung und Befolgung der Flugroute erkennen, | Abs. 48 |
| – dass sie in eine andere Rechtsordnung wechselt (grenzüberschreitender Flugverkehr), | Abs. 49 |
| – dass sie örtlich geltende globale und regionale Rechtsnormen beachten muss (z.B. global geregelte maximale Flughöhe), | Abs. 50 |
| – dass zeitlich statische Rechtsvorschriften berücksichtigt werden müssen (z.B. Flugverbot über AKW), | Abs. 51 |
| – dass zeitlich variable Normen die Flugroute beeinflussen können (z.B. Nachtflugverbot) und | Abs. 52 |
| – dass auch Regelungen mit kurzer Geltungsdauer vorhanden und zu beachten sind (z.B. Flugverbot wegen Veranstaltung). | Abs. 53 |
| Um in der Drohne die Möglichkeit der Berücksichtigung der Rechtsnormen vollständig und umfassend zu implementieren, wäre es notwendig, für jene Rechtsordnungen in deren Geltungsbereich dieses autonome System zum Einsatz kommen soll, alle zum Zeitpunkt der Entwicklung oder Fertigung geltenden Rechtsnormen zu implementieren. Änderungen der Rechtslage müssten über Updates eingespielt werden. | Abs. 54 |
| | | statisch | kurze Geltungsdauer/variabel | | großer örtlicher Geltungsbereich | maximale Flughöhe | Nachtflugverbot in großen Gebieten | | eingeschränkter örtlicher
Geltungsbereich | Flugverbot über einem AKW oder über einzelnen
Grundstücken | Flugverbot wegen einer Veranstaltung | |
| Tabelle 1: Beispiele für Rechtsnormen, die den Handlungsraum einer Drohne beschränken | Abs. 55 |
| Abgesehen davon, dass dieser Überblick über die relevanten Normen mehrerer Rechtsordnungen für Produzenten praktisch nicht erreichbar sein wird, wird bei Rechtsnormen mit kurzer Geltungsdauer, wie Flugverbote bei Veranstaltungen, die Dauer der Programmierung und Verteilung der notwendigen Software-Updates häufig den Anwendungszeitraum der Vorschrift übersteigen. | Abs. 56 |
| Schon dieses einfache Beispiel zeigt, dass die vollständige Implementierung der relevanten Rechtsnormen durch die Hersteller autonomer Systeme in der Praxis nicht möglich ist. | Abs. 57 |
| Dies hat zur Folge, dass zumindest die regional und/oder zeitlich begrenzt geltenden Rechtsnormen durch autonome Systeme nicht beachtet werden können. Je größer deren Verbreitung autonomer Geräte ist, desto öfter werden zumindest derartige Vorschriften nicht beachtet werden, was in der Folge zur Frage führen wird, ob einzelne Normen noch wirksam sind. | Abs. 58 |
| 4. Digitale Rechtsnormen und ihre Kundmachung | |
| Ziel muss daher sein, dass autonome Systeme selbst die für eine konkrete Situation relevanten Rechtsnormen auswerten. Sie müssen in die Lage versetzt werden, Rechtsnormen selbstlernend in den Entscheidungs- und Handlungsraum zu integrieren und dadurch zu beachten und befolgen. | Abs. 59 |
| Voraussetzung dafür ist aber, dass die Rechtsnormen in einer für die Maschine auswertbaren Form kundgemacht und an diese übermittelt werden. Rechtsnormen, also rechtliche Regeln, müssen dafür in digitale Rechtsnormen umgewandelt werden. | Abs. 60 |
| 1.2. Digitale Rechtsnormen | Abs. 61 |
| Digitale Rechtsnormen sind Rechtsnormen, die in einer für Computer unmittelbar aus- und anwendbaren Form vorliegen. Diese Systeme sie können digitale Rechtsnormen autonom auswerten. | Abs. 62 |
| Dabei ist der grundsätzliche Unterschied[6] zwischen dem Gesetzesbegriff im Recht und in Naturwissenschaft bzw. Technik zu berücksichtigen. | Abs. 63 |
| Für Juristen ist ein Gesetz im Allgemeinen eine (meist) in natürlicher Sprache formulierte Anweisung, die Begriffe enthält, die bei der Rechtsanwendung interpretiert werden müssen. Im Gegensatz dazu werden im naturwissenschaftlichen Bereich Gesetze – also Naturgesetze oder algorithmische Folgen von Arbeitsschritten – in der Sprache der Mathematik oder in Programmiersprachen, die syntaktisch und semantisch stark beschränkt sind[7], formuliert. Statt Begriffe, die interpretiert werden, enthalten diese Beschreibungen von Gesetzen Variablen bzw. Parameter, denen Werte (Messwerte oder andere Daten) zugeordnet werden. Diese Daten werden ausgewertet und bearbeitet. | Abs. 64 |
| Beim Beispiel der Drohne würde ein Jurist sich vielleicht die Frage stellen, ob eine Folge von GPS-Daten unter den Begriff der Flugroute zu subsumieren wäre und ob daher eine Norm anzuwenden wäre. Die autonome Drohne würde dies als unstrittig voraussetzen, da die Entscheidung, ob die GPS-Daten für die Beschreibung der Flugroute ausreichen, bereits beim Systemdesign und während der Entwicklung getroffen wurde. Vielmehr würde die Drohne nur[8] übergebene GPS-Daten auswerten und die – entsprechend der entwickelten Programme – optimale Flugroute aus diesen Daten berechnen und gegebenenfalls während des Betriebs autonom anpassen[FK2] . | Abs. 65 |
| Wenn komplexe Berechnungen wie die Erstellung und Überwachung der Flugroute von leistungsstarken Server-Systemen übernommen werden und diese Rechner eine oder auch mehrere Drohne(n) während des Betriebs steuern, muss das Gesamtsystem als autonomes System angesehen werden. Die Autonomie einer einzelnen fliegenden Drohne umfasst dann nur selbständige Reaktionen auf die unmittelbare Umgebung (Ausweichen bei Hindernissen, …). Dennoch wird sie nicht mehr unmittelbar von Menschen gesteuert. Das beschriebene juristische Informationsdefizit betrifft dann das gesamte System, die Kombination von Server und Drohne(n). Das Ziel größtmöglicher Automatisierung und die traditionelle Kundmachung von Rechtsinformation auf unterschiedlichen Hierarchieebenen sind nicht kompatibel. | Abs. 66 |
| Für die Drohne bzw. das autonome Gesamtsystem wird es – zumindest in diesem Beispiel – auch keinen Unterschied machen, ob sich ein Hindernis aus der Topologie des überflogenen Geländes (Gebäude, Berg, …) oder auf Grund der Rechtsordnung ergibt. In beiden Fällen ist die Flugroute anzupassen. | Abs. 67 |
| Rechtskonformes Verhalten für ein autonomes System wie eine Drohne bedeutet daher, Flugdaten auf Konflikte zu Rechtsnormen hin zu überprüfen und bei Vorhandensein solcher Konflikte entweder nicht in Betrieb zu gehen oder das Verhalten, in diesem Fall die Flugroute, entsprechend anzupassen. | Abs. 68 |
| Damit dies effizient möglich ist, müssen die notwendigen Daten z.B. als Liste von GPS-Koordinaten von Gebieten, für die zu einem bestimmten Zeitpunkt Beschränkungen des Flugverkehrs angeordnet sind, verfügbar sein. Diese Daten können dann als Parameter für die Algorithmen zur Berechnung von Flugrouten dienen. | Abs. 69 |
| 1.3. Die Kundmachung digitaler Rechtsnormen | Abs. 70 |
| Digitale Rechtsnormen für autonome Systeme sind daher in konkrete Daten umgewandelte Rechtsnormen, die von diesen Systemen als Parameter für Berechnungen verwendet werden. | Abs. 71 |
| Je nach Geräteklasse werden unterschiedliche Daten benötigt. Sie hängen vor allem von der Komplexität der Funktionen, die autonom ausgeführt werden sollen, und den damit verbundenen Rahmenbedingungen ab. | Abs. 72 |
| Während ein „autonomer Rasenmäher“, der nur auf einem bestimmten Grundstück Gras schneidet, vielleicht nur Informationen über zeitliche Beschränkungen (z.B. zur Verhinderung von Lärmbelästigung) benötigt, wird ein autonomes Kraftfahrzeug eine Vielzahl von rechtlichen Parametern, die zusätzlich vom aktuellen Standort abhängig sind, berücksichtigen müssen. | Abs. 73 |
| Welche Parameter relevant sind, ist bei der Zulassung des autonomen Systems zu definieren. Ebenso müsste die Überprüfung, ob das autonome System die Parameter vollständig und rechtskonform auswertet und in seinem Verhalten berücksichtigt, Voraussetzung für die Zulassung eines solchen Systems sein. | Abs. 74 |
| Nach der Zulassung eines autonomen Systems ist sicherzustellen, dass dieses jederzeit Zugriff auf die für den Betrieb notwendigen digitalen Rechtsnormen hat. Es stellt sich damit das Problem der Verteilung der digitalen Rechtsnormen von einem zentralen Punkt, dem Gesetzgeber, aus. | Abs. 75 |
| Aus technischer Sicht kann dies als verteiltes (Datenbank)System angesehen werden, bei dem der Datenbestand eines Knotens teilweise oder vollständig auf die übrigen Knoten übertragen wird. | Abs. 76 |
| Entsprechend dem aktuellen Stand der Technik wäre die naheliegende Umsetzung über eine private Blockchain[9]. Der Gesetzgeber erzeugt die Blöcke, ist alleine für deren Inhalt verantwortlich und stellt durch die Signaturen sicher, dass die digitalen Rechtsnormen nicht verändert und manipuliert werden[FK3] . Der Vorteil des Aufbaus einer Blockchain ist, dass in den einzelnen Knoten Referenzen auf die digitalen Rechtsnormen, die durch den aktuellen Block „novelliert“ werden, enthalten sind. Das autonome System kann durch Auswertung dieser Referenzen die für einen bestimmten Zeitpunkt relevante Fassung der digitalen Rechtsnorm selbständig berechnen. | Abs. 77 |
| Die einzelnen Systeme melden sich als Knoten der Blockchain, die allgemein zugänglich ist, an und können so auf die digitalen Rechtsnormen, also die für den rechtskonformen Betrieb notwendigen Daten, zugreifen und das autonome Verhalten entsprechend anpassen. | Abs. 78 |
| Entscheidend ist, dass der Gesetzgeber der alleinige Betreiber dieser Blockchain ist und nur er die Blöcke mit den digitalen Rechtsnormen erzeugen und publizieren kann. Die Blockchain selbst hat ausschließlich die Funktion eines Kundmachungsmediums. | Abs. 79 |
| 5. Neue Formen der Legistik | |
| Wie oben dargestellt führt die Entwicklung autonomer Systeme dazu, dass für diese neuen Fähigkeiten von Maschinen ein rechtskonformer Betrieb nicht mehr sichergestellt bzw. gerade wegen der Autonomie der Systeme gar nicht möglich ist. Der Produzent kann zum Zeitpunkt der Produktion keinen Überblick über alle aktuellen und zukünftigen Rechtsnormen, die das Verhalten eines autonomen Systems beeinflussen, haben. Im Wesen der Autonomie liegt es, dass der Betreiber nicht mehr die vollständige Kontrolle über jede einzelne Aktion eines solchen Systems hat. | Abs. 80 |
| Unabhängig davon, ob man solchen Systemen eine Form von Rechtspersönlichkeit zuordnet oder zugesteht, entsteht durch die Autonomie die Notwendigkeit, dass autonome Maschinen in die Rechtsordnung eingebunden werden. Dies bedeutet die technisch zu realisierende Verpflichtung, dass die autonomen Systeme die für sie relevanten Regeln vollständig abrufen und in der Folge auch im Rahmen des autonomen Verhaltens berücksichtigen. | Abs. 81 |
| Mit dieser Verpflichtung muss natürlich auch die Möglichkeit verbunden sein, von den relevanten digitalen Rechtsnormen Kenntnis zu erlangen, wenn deren Wirksamkeit nicht durch die Praxis der Nichtanwendung durch die autonomen Systeme in Frage gestellt werden soll. Denn in Anlehnung an VfGH G 30/56[10] wird in Zukunft pragmatisch auch für autonome Systeme festzustellen sein, dass „eine Vorschrift, zu deren Sinnermittlung … qualifizierte juristische Befähigung und Erfahrung und geradezu archivarischer Fleiß vonnöten sind, … keine verbindliche Norm“ ist. | Abs. 82 |
| Da absehbar ist, dass die technische Entwicklung in Richtung autonomer Systeme nicht verhindert werden kann, werden alleine schon zur Sicherung der Wirksamkeit der Rechtsordnung neue Formen der Legistik entwickelt werden müssen. Die Kundmachung und Bereitstellung digitaler Rechtsnormen wird in Zukunft in manchen Rechtsbereichen Teil des Normsetzungsprozesses sein. Denn wieder in Anlehnung an VfGH G 30/56 ist davon auszugehen, „dass der Gesetzgeber der digitalen Öffentlichkeit den Inhalt seines Gesetzesbeschlusses in klarer und erschöpfender Weise zur Kenntnis bringen muss. Wenn der Zweck der Rechtsordnung auch darin besteht, das autonome System zu einem normgemäßen Verhalten zu veranlassen, so ist der Gesetzgeber gehalten, die Möglichkeit eines solchen Verhalten zu geben.“[11] | Abs. 83 |
| Mit Herberger kann damit abschließend festgestellt werden, dass die aktuellen und absehbaren Entwicklungen auf dem Gebiet der autonomen Systeme „sich als Einladung an die Rechtswissenschaft verstehen lassen, ihr Normen- und Organisationswissen formalisiert so zur Verfügung zu stellen, dass Informatik-Prozeduren darauf zugreifen und dieses Wissen integrieren können. Eine Rechtswissenschaft, die diese Einladung annehmen will (was man ihr nur empfehlen kann), wird das Gehäuse der reinen, nur hermeneutisch orientierten Textwissenschaft verlassen müssen – mit allen wissenschaftstheoretischen und wissenschaftspraktischen Konsequenzen“[12]. | Abs. 84 |
| 6. Literatur | |
| De Filippi, Primavera/Wright, Aaron, Blockchain and the law : the rule of code, Harvard University Press, Cambridge, Massachusetts – London, England 2018. | Abs. 85 |
| Gantner, Felix, „Code is Law“ aber „Is Law Code“? In: Schweighofer, Erich/Kummer, Franz/Saarenpää, Ahti/Schafer, Burkhard (Hrsg.), Datenschutz/Legal Tech Tagungsband des 21. Internationalen Rechtsinformatik Symposions IRIS 2018, Editions Weblaw, Bern 2018, S. 123–130. | Abs. 86 |
| Hausser, Roland, Grundlagen der Computerlinguistik, Springer Verlag, Berlin – Heidelberg – New York 2000. | Abs. 87 |
| Hastie, Trevor/Tibshirani, Robert/Friedman, Jerome, The Elements of Statistical Learning, 2. Auflage, Springer Science+Business Media, New York 2009. | Abs. 88 |
| Herberger, Maximilian, „Künstliche Intelligenz“ und Recht, NJW 39/2018, S. 2826. | Abs. 89 |
| Kelsen, Hans, Reine Rechtslehre, 2. Auflage, Österreichische Staatsdruckerei, Wien 1960 Nachdruck 1992. | Abs. 90 |
| lachmayer, Friedich, Personalisierung von Maschinen. In: Schweighofer, Erich/Menzel, Thomas/Kreuzbauer, Günther (Hrsg.), Auf dem Weg zur ePerson. Aktuelle Fragestellungen zur Rechtsinformatik 2001, Verlag Österreich, Wien 2001, S. 55–64. | Abs. 91 |
| Schirmer, Jan-Erik, Sind Roboter Rechtspersonen?, The European, https://www.theeuropean.de/jan-erik-schirmer/14166-rechtspersoenlichkeit-fuer-autonome-systeme (aufgerufen am 31. Oktober 2018), 2018. | Abs. 92 |
| Schweighofer, Erich, Vorüberlegungen zu künstlichen Personen: autonome Roboter und intelligente Softwareagenten. In: Schweighofer, Erich/Menzel, Thomas/Kreuzbauer, Günther (Hrsg.), Auf dem Weg zur ePerson. Aktuelle Fragestellungen zur Rechtsinformatik 2001, Verlag Österreich, Wien 2001, S. 45–54. | Abs. 93 |
| Solum, lawrence B., Legal Personhood for Artificial Intelligence, North Carolina Law Review, Vol. 70, S. 1231, 1992 und Illinois Public Law Research Paper No. 09-13 (https://papers.ssrn.com/sol3/papers.cfm?abstract_id=1108671, aufgerufen am 31. Oktober 2018). | Abs. 94 |
| Thienel, Rudolf, Geltung und Wirksamkeit. In: Paulson, Stanley L./Walter, Robert (Hrsg.), Untersuchungen zur Reinen Rechtslehre, Manz Verlag, Wien 1986, S. 20–50. | Abs. 95 |
| Weinberger, Ota, Alternative Handlungstheorie, Böhlau Verlag, Wien – Köln - Weimar 1996. | Abs. 96 |
|
| |
| Fußnoten: | |
| [*] Dipl.-Ing. Dr. iur. Felix Gantner ist selbständiger Berater für Rechtsinformatik. Der Schwerpunkt seiner Tätigkeit liegt auf der Konzeption und Entwicklung von Systemen für Gerichte und juristische Verlage. Er war bis 2018 Mitglied des Vorstands des EDV-Gerichtstages e.V. Kontakt: infolex Rechtsinformatik Bei der Kapelle 7, 3592 Röhrenbach, AT, E-Mail: gantner(at)infolex.at; http://www.infolex.at.
| |
| [1] Kelsen, Hans, Reine Rechtslehre, S. 10. | |
| [2] Vgl. Thienel, Rudolf, Geltung und Wirksamkeit, S. 38f. | |
| [3] Vgl. z.B. Solum, lawrence B., Legal Personhood for Artificial Intelligence; Schweighofer, Erich, Vorüberlegungen zu künstlichen Personen: autonome Roboter und intelligente Softwareagenten, S. 49ff. | |
| [4] Schirmer, Jan-Erik, Sind Roboter Rechtspersonen?, https://www.theeuropean.de/jan-erik-schirmer/14166-rechtspersoenlichkeit-fuer-autonome-systeme. | |
| [5] „Geografisch global“ meint in diesem Fall den gesamten örtlichen Geltungsbereich der Rechtsordnung. | |
| [6] Vgl. Gantner, Felix, „Code is Law“ aber „Is Law Code“?, S. 125f.. | |
| [7] Vgl. Hausser, Roland, Grundlagen der Computerlinguistik, 137ff. | |
| [8] Dies ist auch bei KI-Anwendungen, insbesondere bei neuronalen Netzen, nicht anders, da diese beim Lernen keine Begriffe „hinterfragen“, sondern statistische Beziehungen zwischen Daten erzeugen: „The central idea is to extract linear combinations of the inputs as derived features, and then model the target as a nonlinear function of these features.“ (Hastie, Trevor/Tibshirani, Robert/Friedman, Jerome, The Elements of Statistical Learning, S. 389.) | |
| [9] Vgl. die Konzepte einer “Blockchain of Things” in De Filippi, Primavera/Wright, Aaron, Blockchain and the law : the rule of code, S. 156ff. | |
| [10] VfGH 14. Dezember 1956, G30/56: „Eine Vorschrift, zu deren Sinnermittlung subtile verfassungsrechtliche Kenntnisse, qualifizierte juristische Befähigung und Erfahrung und geradezu archivarischer Fleiß vonnöten sind, ist keine verbindliche Norm.“ | |
| [11] VfGH 14. Dezember 1956, G30/56: „Daraus folgt, daß der Gesetzgeber der breiten Öffentlichkeit den Inhalt seines Gesetzesbeschlusses in klarer und erschöpfender Weise zur Kenntnis bringen muß. Wenn der Zweck der Rechtsordnung darin besteht, den Menschen durch die Vorstellung der Norm zu einem normgemäßen Verhalten zu veranlassen, so ist der Gesetzgeber gehalten, die Möglichkeit einer solchen Vorstellung zu geben.“ | |
| [12] Herberger, Maximilian, „Künstliche Intelligenz“ und Recht, S. 2828. | |
|
| |
| [online seit: 01.10.2019] | |
| Zitiervorschlag: Autor, Titel, JurPC Web-Dok, Abs. | |